












Members: Matching Tension with Mirrored Systems
My good friend, Pat Rhodes, has long been asking big questions about the differences in tension between the two strands of mirrored rope rescue lowering systems. Pat’s classes often include practical demonstrations showing just how easy it is to defeat the perceived security of these systems.Traditionally, these mirrored, or twin-tensioned lowering systems, are operated as shown in the following image.
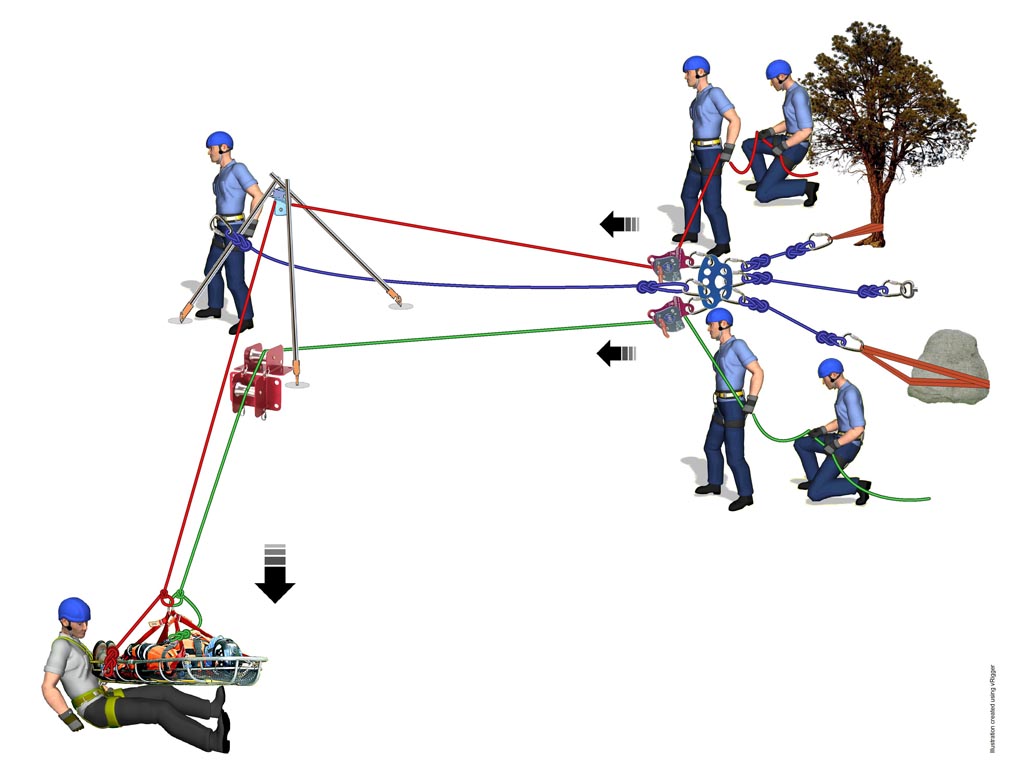
The challenge for operators is to attempt to maintain roughly equal tension in the two lowering systems. This is important because if one line is significantly tighter than the other, then it is this tight line which is more likely to fail during rock-fall or lateral movement. If this does occur, then there is a potential slingshot effect onto the slack system and this may be too much for the operator to manage.
We did a few tests in the lab in 2014 with the help of Dallas Atkinson and William Proctor to test this possibility. The video of these tests is included below.
We caught the load in each case. However, I believe the following factors worked in our favour and should be noted:
- The amount of rope in service was only 10m.
- The operators were familiar with the use of the devices.
- The operators were expecting a failure to occur.
While we did manage to catch the load in each case, I would not say that we did a particularly good job of maintaining equal tension. It would be reasonable to suggest that tensions in each side of the system reached 70/30 rather than the ideal of 50/50. It is conceivable that this could easily go to 90/10 for inattentive operators.
Truly mirrored systems
My experiences with teaching Skate Block Systems have suggested that using two Petzl I’D S devices back to back and operated by a single person provides much better tension sharing. Others have certainly been using similar setups for long rope (>50m) descents and contact rescues in rope access. The ideas underpinning all of these twin tensioned systems include:
- Complete redundancy from load to anchor. The system can tolerate any single point of failure or any single mistake by an operator.
- Minimal movement in the system in the event of any single failure.
- The ability of the remaining system to complete the task following any single failure.
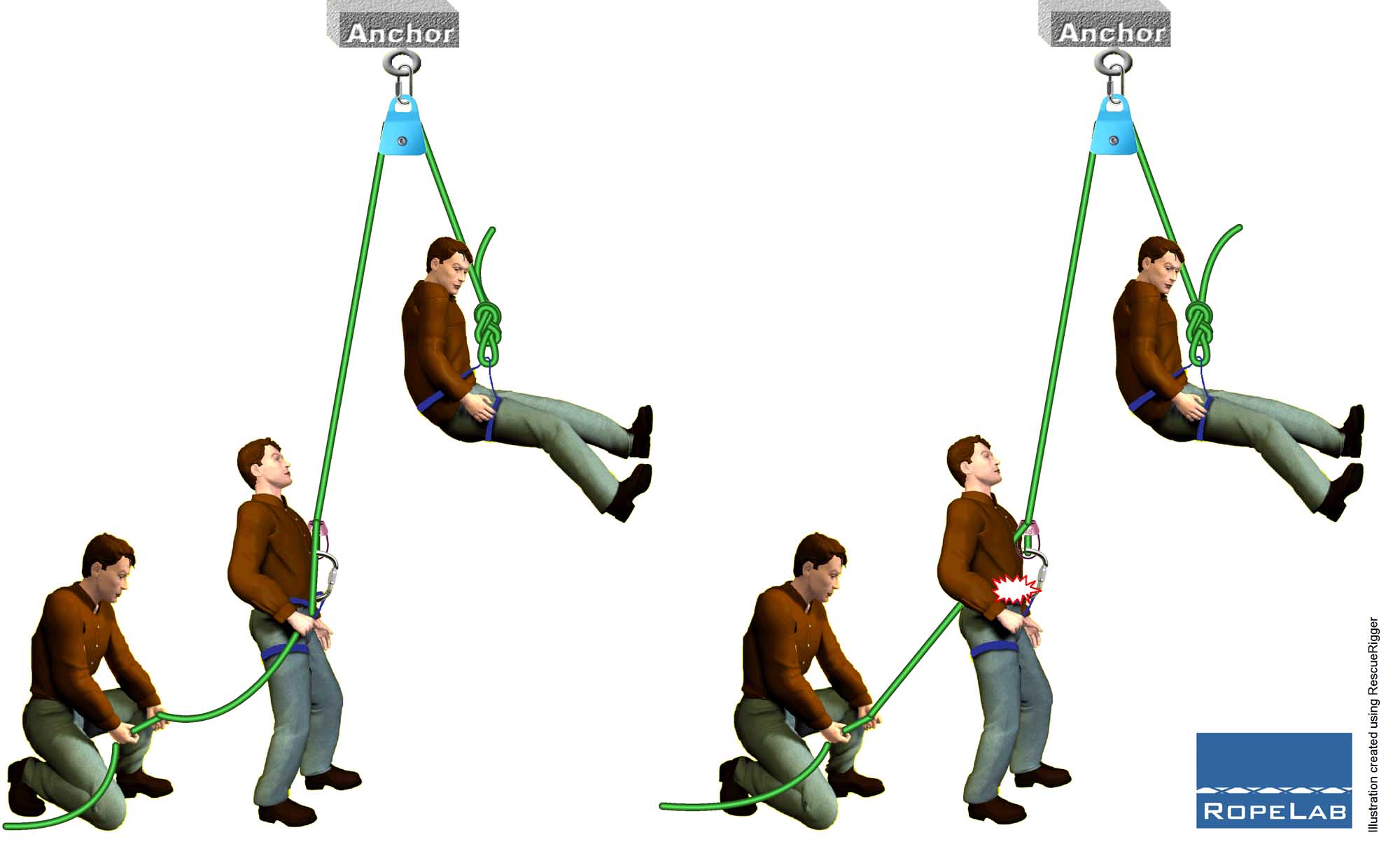
The significant difference of approach with the back to back I’D S devices is that they can both be operated together by a single person. The following image shows the operator’s right hand managing both handles and the left hand managing both brake ropes.

The only potential opportunity for failure is now the single operator and this can be overcome by tasking a second operator with tailing both the brake ropes and also ensuring both ropes are tangle free. This person is commonly referred to as a ‘back-up belayer’ and their role is simply to provide redundancy to the primary belayer’s brake hand. This concept is used often in recreational top-rope climbing, especially when non-auto-locking belay devices are used.
Mirrored I’D S for rescue loads
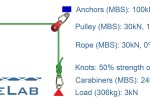
We undertook a series of tests and measured the tensions on each strand in the system as shown below.
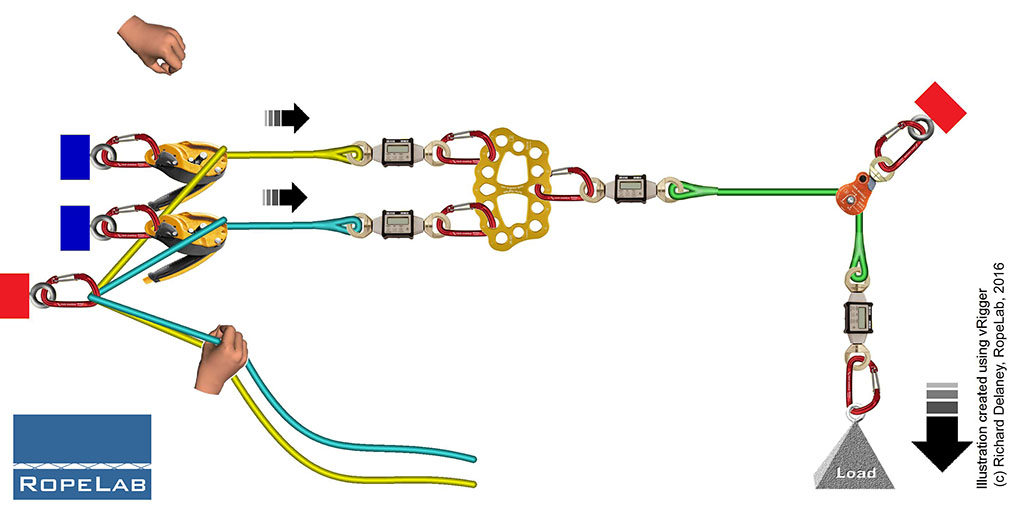
The load was a 275kg rigid steel mass and, for each test, this was lowered through 5.5 metres. The load cells above and below the pulley confirmed approximately 10% loss through the pulley.
Results
An initial test was performed to explain the function of the system and to test the capacity to continue in the event of failure on side.
This next test was a straight lower to observe the relative tensions.
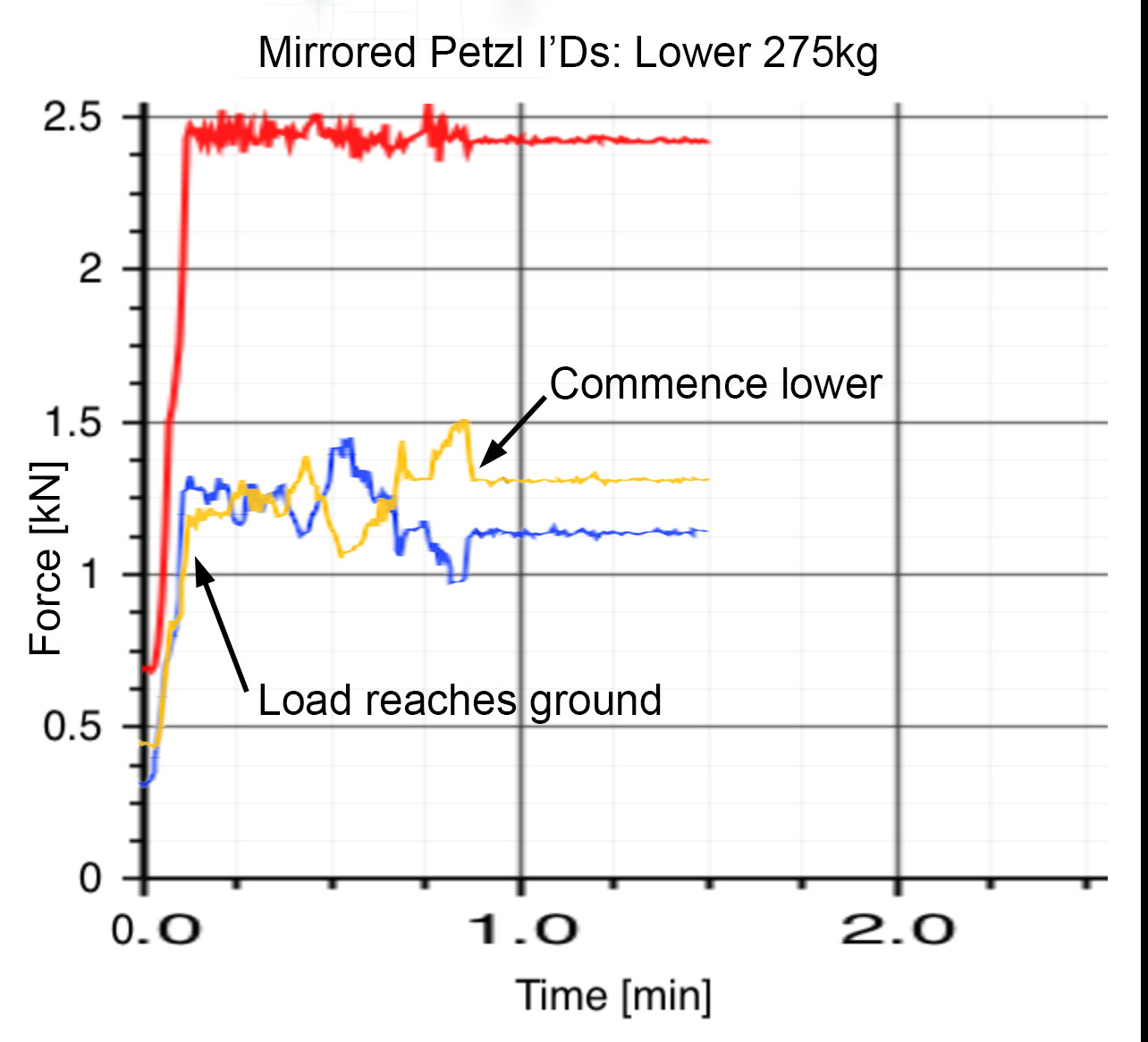 This plot can be interpreted as follows:
This plot can be interpreted as follows:
- The test mass was 275kg but the Red plot only reads 2.45kN. This difference is due to the 10% frictional loss through the pulley.
- The Blue and Yellow plots show the tensions in the blue and yellow ropes.
- The biggest imbalance in tensions was at the start and shows yellow at 1.5kN (60% of 2.45kN) and blue at 1.0kN (40% of 2.45kN).
- Once the initial imbalance was overcome, the tensions swung between 1.35kN (55%) and 1.10kN (45%).
Another test was observed to measure deliberate attempts to achieve differing tensions.
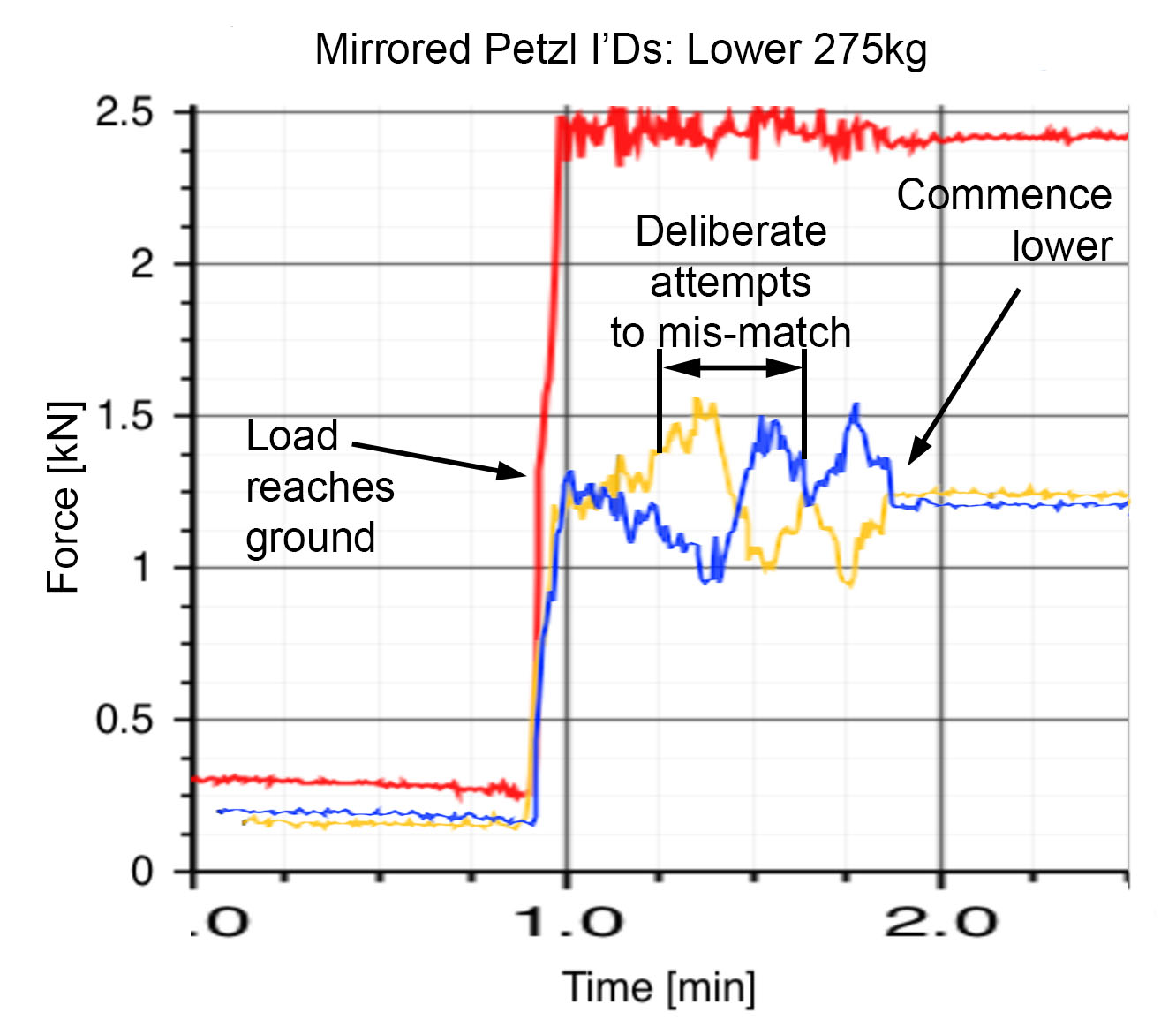
Even with this effort, the split between the systems was 60/40.
Observations
From these tests and the ones we performed previously we can say:
- A single operator managing two devices can achieve shared tension far more easily than separate operators on separate devices.
- An attentive single operator should be able to maintain better than a 60/40 tension split between systems.
- Even though Petzl state a maximum of 250kg for rescue lowers using the I’D S, introducing a single high-efficiency pulley makes this device compatible with 275kg (600lbs) loads. Keep in mind that when used in a 60/40 mirrored system that each device should only be managing 150kg.
© Richard Delaney, RopeLab, 2016
Related Posts



About The Author
Richard Delaney
Richard Delaney has worked professionally with ropes since 1992 as a multi-pitch rock-climbing instructor, technical rescue instructor and rope access technician. Understanding and teaching the Physics of Rigging is a core passion of Richard’s, one based on his experience, and his prior professional life as a qualified engineer.
Add a Comment
You must be logged in to post a comment.
Curious if this setup has been subjected to EMBC testing?
Not by me, but many have tested Dual Main systems against EMBC.